計畫流程 - (建立)2017/5/16
1. 討論要繪畫何種步行機構
我們原本是要製作四角步行者,但因為45號用V-rep檢驗出結構不穩定,而淘汰,最後決定繪畫8連桿的仿生獸
四腳步行者,結構不穩定
2017-05-12_21-45-50 from 40423245 on Vimeo.
仿生獸
2. 用Onshape繪畫出仿生獸的初步構造
我複製45號繪畫的8連桿,來組裝出仿生獸,最後跟45號合力完成初步樣貌
用Onshape觀看仿生獸
組裝重點
仿生獸-組裝重點 from 40423222 on Vimeo.
初步完成
仿生獸-初步完成 from 40423222 on Vimeo.
3. 用V-rep模擬出在地板行走的影片
45號用V-rep模擬確認哪裡需要改良
用V-rep模擬仿生獸
2017-05-16_21-47-51 from 40423245 on Vimeo.
4. 製作出實體模型
因為3D列印的機會只有一次,所以我決定要製作出實體模型,下課到我房間集合,從集結材料到製作出成品,共花費的4小時....
原先45號有先自己製作出紙製模型,但因為強度跟組裝,我不認同,所以才沒製作

之後我跟48號去準備材料,材料費由我來承擔,45號跟51號準備等要製作的尺寸圖,經過3小時多的時間,作後完成了.......
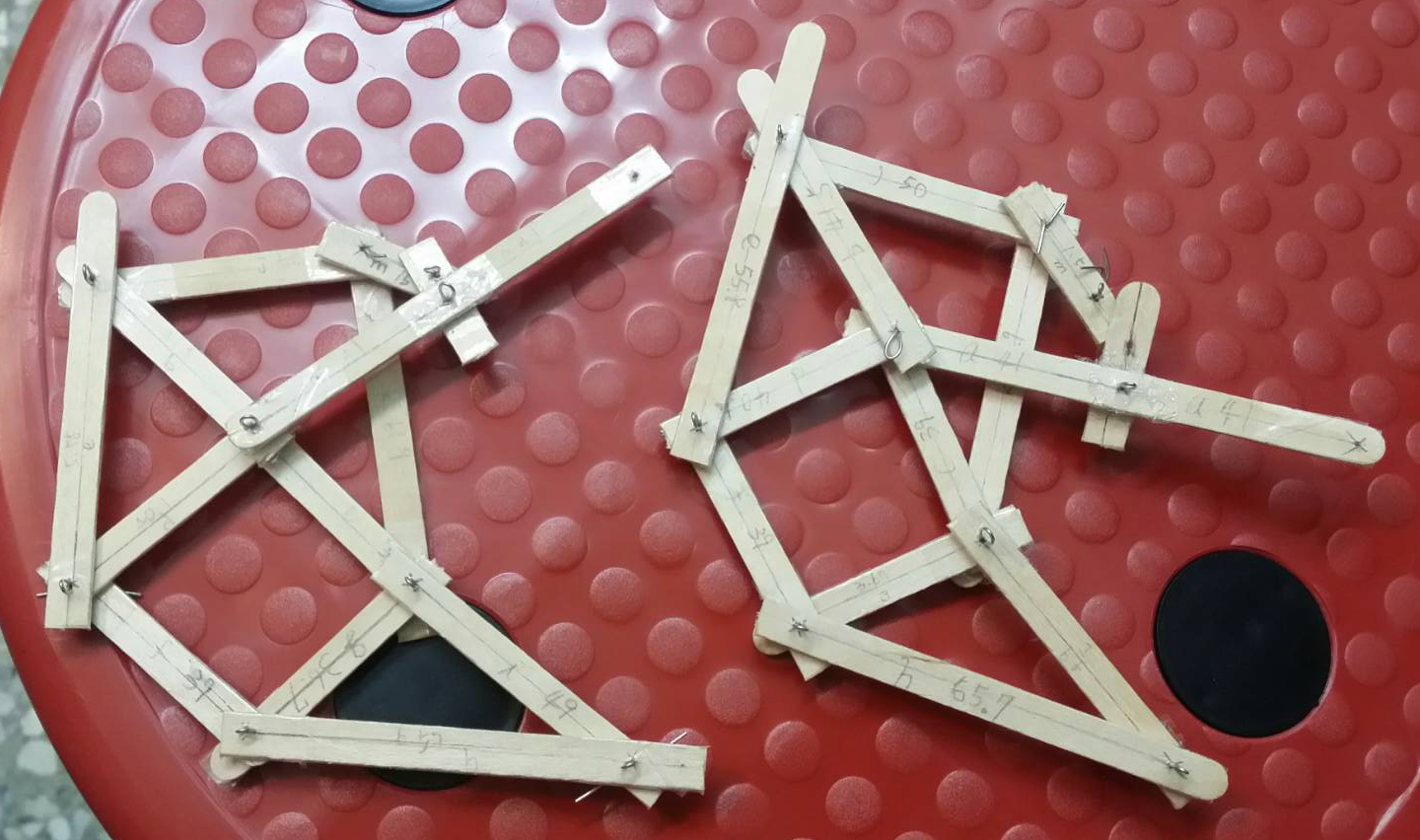
雖然因為軸繪卡點,還有無法合併,再加上累了,而放棄了繼續製作,但也因為有這次組裝的經驗,發現軸帶過細小(值徑: 3 mm),也發現軸要改成螺栓,並也將要重新設計仿生獸,不再是六隻腳,將會桿成四隻腳,並在中央設置齒輪箱
5. 用V-rep模擬出在地板行走的影片
經由45號不斷地修改加測試,仿生獸終於能在地上行走,雖然最後還是會出錯,但已經能看到幾秒行走的過程
2017-05-18_21-54-06 from 40423245 on Vimeo.
6. 改進第一代仿生獸
點擊這觀看第二代仿生獸
注意: 第二代仿生獸在下方標題的error內
Onshape-第二代仿生獸-行走影片
注意:Onshape只能顯現外表,無法顯現干涉 / 內應力 / 物體重量 等等....
Onshape-第二代仿生獸-介紹
比起第一代仿生獸,新增了平台,來放置Arduino板 and Motor .....
繪畫螺紋
軸原本要使用螺栓,但因為會阻礙到連桿,所以放棄這作法
Oshape繪畫螺紋 from 40423222 on Vimeo.
7. 改進第二代仿生獸
Onshape-第三代仿生獸-行走影片
注意:Onshape只能顯現外表,無法顯現干涉 / 內應力 / 物體重量 等等....
因還有許多地方要改進,所以不拍攝影片
Onshape-第三代仿生獸-介紹
比起第二代仿生獸,更新了平台 / 連桿 / 軸,更輕更帥氣
窩桿渦輪
點擊這觀看45號,所製作的Blog
40423245機械設計工程系 - 協同產品設計實習課程W14-在Onshape中繪製蝸桿蝸輪 from 40423245 on Vimeo.
8. 第三代仿生獸
點擊這觀看第三代仿生獸
介紹影片
第三代仿生獸介紹-30秒到3分有爆音 from 40423222 on Vimeo.
注意: 00:30到03:00影片有爆音
還未完成:
確認馬達規格
Onshape行走影片(有太多問題就放棄)
45號的V-rep模擬
9. 最後
在找了學長了之後 才知道軸不能太細(會印不出來) 因此我跟48號去 找代替軸的商店(並要他製作商店資訊)
但軸都是有特定規格 要在改設計太花時間 所以最後決定 最長的軸不印 其餘的軸給45號加大
還有齒輪不能小於13齒(聽說齒輪會斷)
松億螺絲
聽學整說有一家賣螺絲的店家

地址:632雲林縣虎尾鎮光明路66號
營業時間:週一至周五 早上8:10至下午17:10
電話:05-632-2204
修改仿生獸
這是仿生獸最後修改完的連結
等待印完
禮拜五列印完成 也就是說禮拜五以後才會有實體(而且還要組裝)
工作分配
| 組長: 40423222 | 討論要繪畫何種步行機構: 跟組員互相討論 |
| 用Onshape繪畫出仿生獸的初步構造: 組裝出仿生獸 | |
| 做出實際模型: 材料,打洞,組裝 | |
| 改進第一代仿生獸: 組長負責 | |
| 改進第二代仿生獸: 更新零件跟組裝 | |
| 第三代仿生獸: 繪製見開線齒輪,組裝成形 | |
| 最後: 跟45去看松億,修改仿生獸(齒輪/底板/軸/馬達座) | |
| 紀錄仿生獸的開始到結束 | |
| 組員: 40423245 | 討論要繪畫何種步行機構: 跟組員互相討論 |
| 用Onshape繪畫出仿生獸的初步構造: 繪畫出組裝零件 | |
| 用V-rep模擬出在地板行走的影片: 45號製作 | |
| 做出實際模型: 初版模型,標打洞記號,組裝 | |
| 改進第二代仿生獸: 繪畫出窩桿渦輪 | |
| 第三代仿生獸: 繪製Arduino固定架,組裝成形 | |
| 最後: 修改仿生獸(連桿),匯出零件列表 | |
| 組員: 40423248 | 討論要繪畫何種步行機構: 跟組員互相討論 |
| 做出實際模型: 材料,打洞,組裝 | |
| 最後: 查看商店(並製作Blog),將零件列表寄給學長(並接收列印進度) | |
| 組員: 40423251 | 做出實際模型: 標打洞記號,組裝 |